
Please, visit Part 1. Introduction if you haven’t read it yet.
Scheme
First, we did some brainstorming about how to make the mascot walk. We thought that the best option was to build balanced hips. It moves up one leg and rotates it forwards without friction. Then it moves it backward at the same time the other leg moves forward.
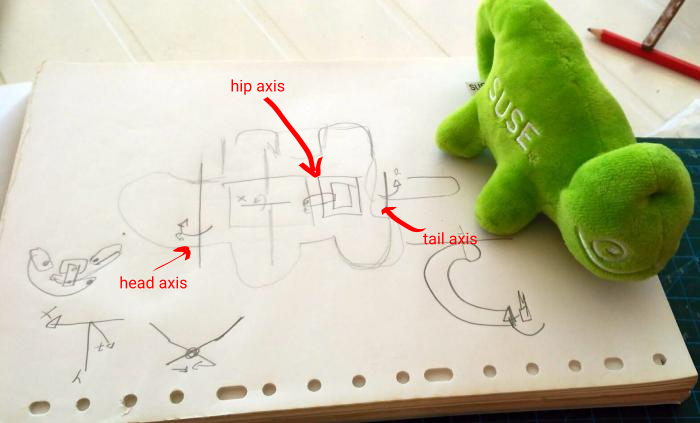
We need 5 servos in total:
- Two servos for the legs
- One servo for the hips
- One servo for the head
- One servo for the tail
The number of servos is important because it will affect to the battery needs.
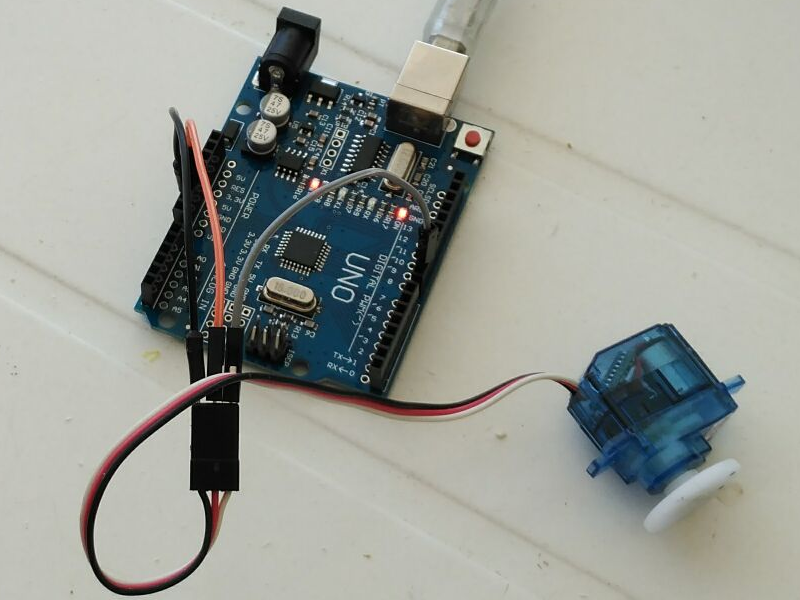
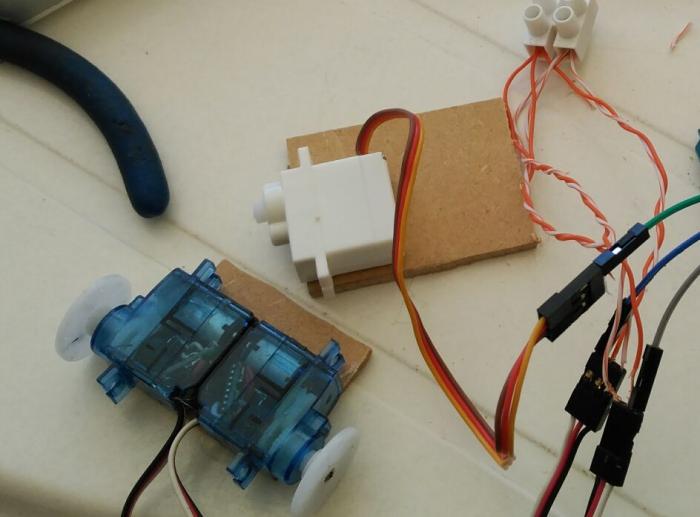
First tests
First, we tested all the servos with a standard source code of Arduino that you can find in the examples.
Creating the skeleton
We created the skeleton using 3mm MDF
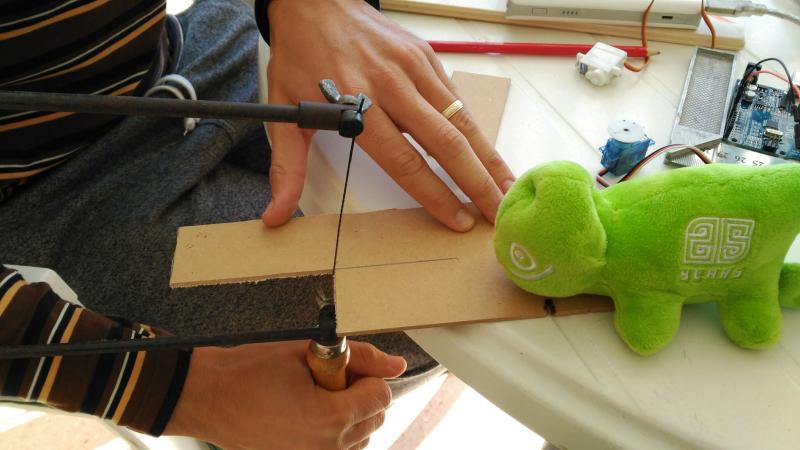
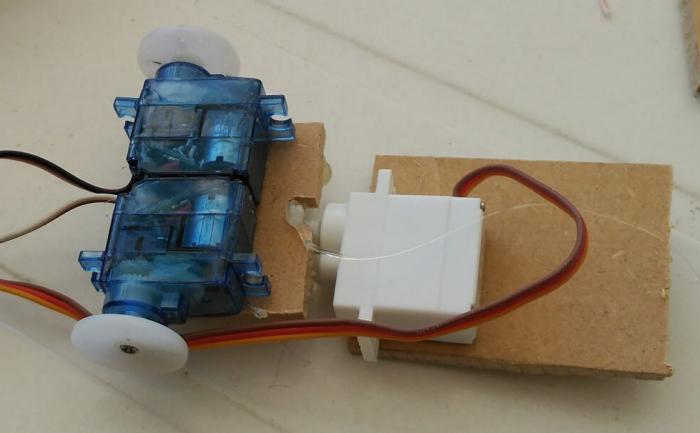
To glue the servos to the wood we used hot glue.
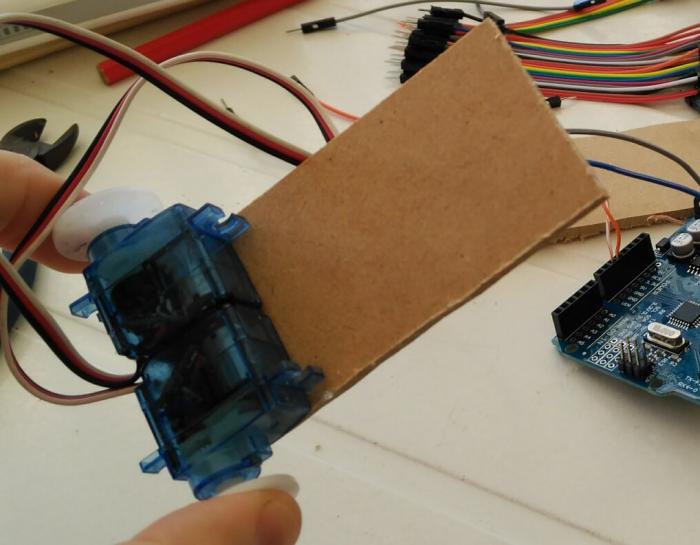
Then we divided the primary skeleton in two parts to create the hips and assemble all together
We made the rear legs

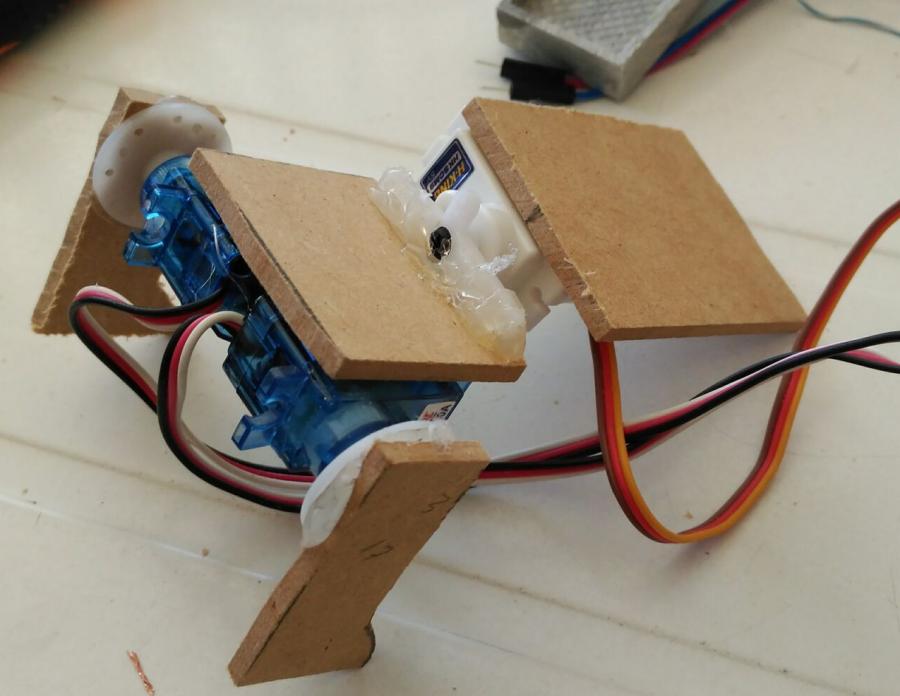
And then we created the head

The final result!

Continues in Part 3 – Brain & Code