
Robotic SUSE Mascot – Part 4. Brain & Code
Please visit Part 3 – Electronics
With Arduino it is very easy to move a servo to any position between 0 and 180 degrees. You only need to connect the input signal of the servo to a PWM output of the Arduino. In fact, there is a library included to move servos.
Continue reading “Robotic SUSE Mascot – Part 4. Brain & Code”
Robotic SUSE Mascot – Part 3. Electronics
Please visit Part 2 – Design & sckeleton
The connection pin scheme for Arduino is:
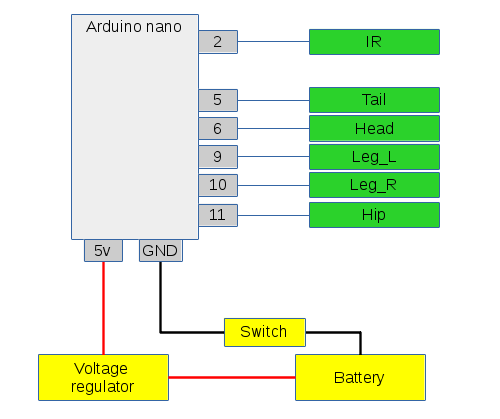
Continue reading “Robotic SUSE Mascot – Part 3. Electronics”
Robotic SUSE Mascot – Part 2. Design & Skeleton
Please, visit Part 1. Introduction if you haven’t read it yet.
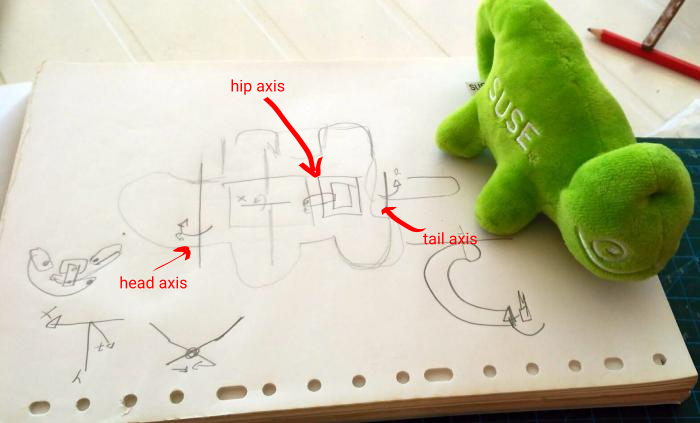
Scheme
First, we did some brainstorming about how to make the mascot walk. We thought that the best option was to build balanced hips. It moves up one leg and rotates it forwards without friction. Then it moves it backward at the same time the other leg moves forward.
Continue reading “Robotic SUSE Mascot – Part 2. Design & Skeleton”
Robotic SUSE Mascot – Part 1. Introduction
In our Hackweek at SUSE we have time to develop our most crazy ideas and projects. My brother and me thought that it could be interesting to create a robotic SUSE pet. The presentation of our proposal was:
The idea is to create a fantastic robotic SUSE mascot using cheap materials. It shall be controlled with you remote control of your TV. After building the prototype the schemes and Arduino code will be delivered for everyone to try building it at home.
We thought of several movements:
- Tail movements, cause it has to be nice
- Head movement to be more realistic
- And the most difficult part, making it walk
Continue reading “Robotic SUSE Mascot – Part 1. Introduction”